자율주행차 기술의 핵심이 되는 도로 정밀지도를 제작 중인 네이버랩스가 정밀지도 제작의 새로운 개념인 ‘하이브리드 HD 매칭’ 기술을 공개하고, HD 맵 데이터셋을 외부에 개방한다고 밝혀 이목을 끌었다.
네이버랩스 백종윤 자율주행그룹 책임리더와 이진한 매핑&로컬라이제이션 리더는 28일 서울 삼성동 코엑스에서 열린 네이버 개발자 컨퍼런스 ‘데뷰 2019’에서 ‘Urban HD Mapping for On-Road Intelligence’란 주제로 강연을 진행했다.
네이버랩스에 따르면 이 회사는 그 동안 쌓아온 자율주행 기술들을 활용해 보다 비용효율적으로 대단위 고정밀 지도를 만들 수 있는 새로운 방법을 개발 중이다. 이를 토대로 기계가 읽을 수 있는 형태로 서울시 도로에 대한 고정밀 지도를 구축하고 있다.

기존에는 보통의 MMS(mobile mapping system) 차량을 이용해 도로 정밀지도를 제작했다. 그러나 라이다 센서를 사용하면 음영지역이 발생하기 때문에 같은 지역을 여러 번 돌아야 하는 번거로움이 컸다. 데이터 보정을 위해 사람이 측량 작업까지 하다 보니 비용이 많이 들었다.
네이버랩스가 자신하고 있는 하이브리드 HD매핑 기술은 자율주행머신을 위한 고정밀 지도를 만드는 독자적인 솔루션이다. 도심 단위 대규모 지역에서 촬영한 항공사진 이미지에서 도로 면의 레이아웃 정보를 추출하고, 자체 개발된 MMS(mobile mapping system)인 R1이 수집한 데이터를 유기적으로 결합하는 방식으로 광대한 영역의 HD맵을 빠르고 정확하게 제작한다.
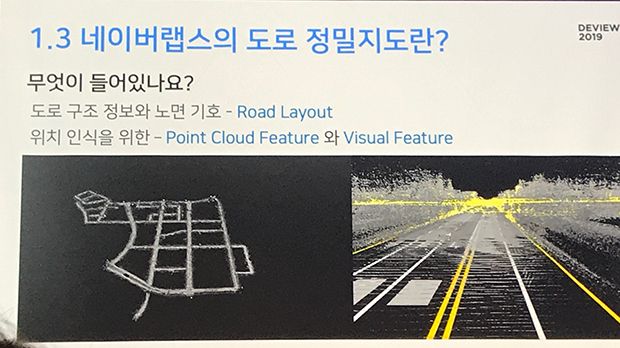
고화질 항공사진에서 건물과 가로수 등 정보를 뽑을 수 있으며 땅과 건물 분리도 가능하다. R1은 육교 아래, 터널 안 등 항공사진에 포함되지 않은 정보들을 수집하고 보정한다.
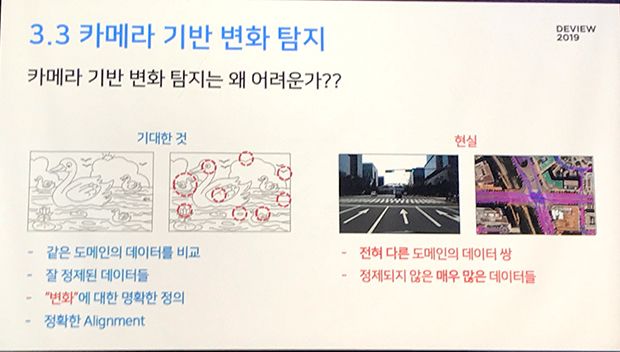
나아가 네이버랩스는 항공지도 업데이트 주기가 너무 느리다는 단점을 보완하기 위해 ‘지도 업데이트를 위한 변화 탐지 기술’도 연구 중이다. 자율주행차량을 활용한 변화 탐지와 크라우드 소싱을 위한 카메라 기변 변화 탐지 기술을 개발한 것. 이를 통해 항공지도보다 빠른 지도 업데이트가 가능하다.
여기에 네이버랩스는 카메라 기반 변화 탐지를 통해 항공사진과 자율주행차량 혹은 MMS 장비의 한계를 보완한다.
관련기사
- 손으로 쓴 200자가 폰트로...네이버 ‘손글씨체’ 기술 상용화 단계2019.10.28
- [영상] 네이버, 백덤블링 하는 ‘미니치타’ 로봇 공개...文 대통령도 ‘깜짝’2019.10.28
- 석상옥 "AI 석학들, 네이버 R&D 센터로 모인다"2019.10.28
- 문재인 “올해 완전히 새로운 AI 국가전략 제시”2019.10.28
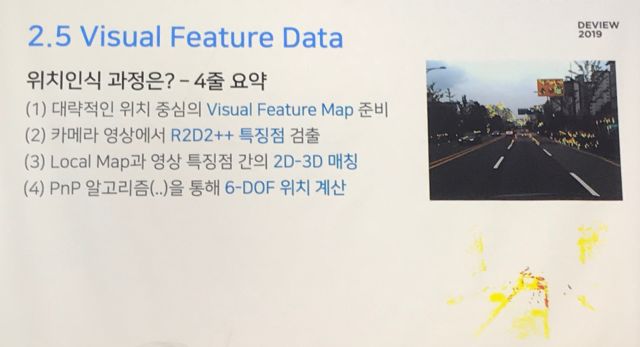
이렇게 제작한 정밀지도는 자율주행을 위한 위치 인식, 라이다 데이터 시뮬레이션 개발, 차선 단위의 정밀 길안내에 활용될 수 있다.
네이버랩스는 이렇게 만든 HD 맵 데이터셋을 신청만 하면 누구나 사용할 수 있도록 공개한다는 방침이다. 네이버랩스 홈페이지를 통해 신청하고 내려받으면 된다. 이 회사는 점점 더 넓은 지도 데이터를 오픈한다는 계획이다.