동물의 움직임으로부터 영감을 얻어 탄생한 로봇들이 화제다. 세계 각지의 로봇 제작 업체들이 동물에 주목하고 있다.
28일(현지시간) 미국의 IT미디어 리코드는 동물들의 섬세하고 역동적인 움직임을 모방해 빠르게 달리고 장애물을 뛰어넘는 로봇들을 소개했다.
■ 단순한 움직임으로 거친 땅위를 달리는 바퀴벌레 로봇

여섯 개의 다리를 지닌 바퀴벌레는 겉으로 보기엔 단순한 움직임을 보이지만, 발을 딛을 곳을 전혀 고려하지 않고 힘차게 발짓을 해 안정되고 재빠르다.
언덕과 바위 사이 등 고르지 않은 땅을 돌아다닐 수 있도록 제작된 로봇 'RHex'는 미국의 보스턴 다이내믹스사의 연구원들이 바퀴벌레가 움직이는 모습에서 아이디어를 얻어 제작했다. 이 로봇은 다리 여섯 개의 단순한 움직임을 연속적으로 반복한다.
도중에 뒤집히거나 장애물을 마주해도 걱정할 필요 없이 거친 지형을 쉽게 벗어날 수 있다.
■ MIT 한국인 교수가 개발한 치타 로봇
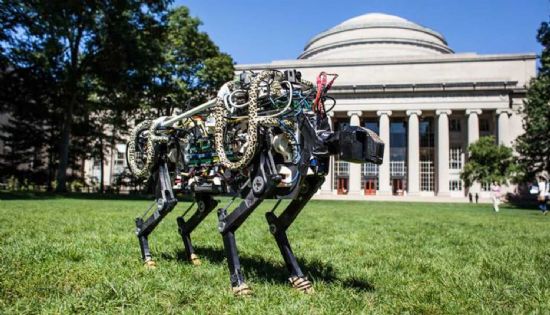
지난 2015년 매사추세츠공과대학(MIT)의 로봇 공학자들은 네 개의 다리를 이용해 전속력으로 달려 장애물을 뛰어넘는 로봇 '치타(Cheetah)'를 공개했다. 지구상에서 가장 빠른 동물인 치타의 모습을 모방한 이 로봇은 한국인 김상배 교수가 속한 연구팀이 제작했다.
치타의 움직임에서 영감을 얻은 이 로봇은 장애물을 뛰어 넘을 때 안전하게 착륙하기 위해 필요한 힘의 양을 결정한다. 또 단순히 네 다리를 이용해 달리는 것이 아닌 등뼈를 앞뒤로 움직여 달리고 땅을 딛고 뛰어 오르는 능력 등 치타의 역학적 움직임이 적용됐다.
■ 촉수에 달린 빨판으로 물체를 단단히 고정하는 문어 로봇

작은 틈을 비집고 들어가고 때론 민첩하기까지. 문어는 로봇 연구자들에게 매력적인 연구 대상이다. 특히 다리에 달린 촉수의 빨판은 부드러우면서도 강력하게 물체를 고정할 수 있다.
독일의 로봇 회사인 페스토(Festo)는 문어가 지닌 촉수의 움직임과 흡인력에 주목했다. '옥토퍼스그리퍼(Octopus Gripper)'라는 이름을 가진 이 로봇은 실리콘으로 제작됐다. 물체를 부드럽게 구부리거나 감쌀 수 있고, 또 팔이 빠르게 움직이는 동안에 빨판처럼 생긴 흡입부를 이용해 크기와 모양이 다양한 물체를 단단히 고정할 수 있다.
■ 힘차게 달려도 쉽게 넘어지지 않는 타조 로봇

올해 초 미국 오레곤주립대 연구팀은 타조의 보행을 모방한 이족 보행 로봇 ‘캐시(Cassie)’를 제작했다. 이 로봇은 1초에 3m를 뛰어 갈 수 있고 최대 10시간 동안 사용 가능하다.
연구팀은 날지 못하는 새인 타조가 쉽게 넘어지지 않는 점에 주목했다. 관절들을 움직이기 위해 모터를 구동하는 대신 스프링을 쓰는 등 원초적인 방법을 택했다.
관련기사
- 두바이 "경찰 네 명 중 한 명 로봇으로 대체"2017.05.29
- 도미노, 피자 배달 로봇 독일서 정식 가동2017.05.29
- 쓰레기 분리수거 돕는 'AI' 로봇2017.05.29
- 거대 로봇 대결 8月 개최…"에반게리온 현실로"2017.05.29
지진, 방사능 유출 등 각종 재난이 발생할 경우 사람의 손이 닿지 않는 곳에도 활용될 것으로 보인다. 또 업체는 언젠가 이 로봇이 각 가정에 물품 등을 배달할 수 있을 것이라고 기대한다.
로봇 공학자이자 카네기 멜론대학에서 기계공학을 가르치는 애론 존슨(Aaron Johnson) 교수는 “인간이 상상할 수 있는 거의 모든 동물들이 로봇 제작에 영감을 주고 있다”면서 “이들은 동물의 움직임과 행동을 정확히 모방하기 보다는 동물들이 움직이는 원리를 이해하고 이를 새로운 시스템에 적용하고 있다”고 설명했다.