자율주행차 안정성에 대한 세간의 우려가 지난해에 이어 올해에도 다시 한 번 시장을 뒤흔들고 있다.
자율주행차 위기론이 터져나온 배경은 지난 5월 발생한 테슬라 '모델 S' 운전자 사망사고다. 당시 자율주행 모드 ‘오토파일럿(Autopilot)’이 실행되던 모델 S는 미국 플로리다주에 위치한 한 교차로에서 좌회전 중이던 대형 트레일러를 인지하지 못하고 그대로 들이받았다. 이로 인해 운전자가 사망하는 안타까운 일이 발생했다.
일론 머스크 테슬라 CEO 등 회사 임직원들은 블로그를 통해 이번 사고 경위를 자세히 설명했다. 또 사고로 목숨을 잃은 운전자에 대해 “참담하다”는 심경을 남겼다.
이같은 사고로 테슬라 뿐만 아니라 전 세계 자율주행차 산업계에 먹구름이 드리워지고 있다. 하지만 오토파일럿 등의 기술은 운전자 보조 시스템 개념인만큼, 완전 자율주행차 시대를 위해 조금 더 기다려야 한다는 목소리가 나오고 있다.

■월간보고서로 위기론 맞선 구글
구글의 경우 지난해 5월 자율주행차 신뢰도에서 최대 위기를 맞은 경험이 있다.
구글은 지난해 5월 11일 당시 발표에서 “지난 6년간 자율주행차를 약 280만km를 주행하면서 총 11건의 주행 사고가 일어났다”고 밝혔다. 이 중 3건은 지난 2014년 9월 이후 발생됐다.
구글은 11건의 사고 중 자사의 자율주행차가 가해차량으로 지목된 경우는 없었다고 밝혔다. 하지만 이같은 구글의 발표는 자동차 업계뿐만 아니라 소비자 단체의 불신을 일으켰다.
미국 비영리 소비자 단체 컨슈머 워치독은 구글의 발표 직후 낸 성명에서 “구글은 고속도로에서 운전자들의 위험을 증가시키는 무인차 시범 주행에 나서고 있다”며 “모든 사회가 구글의 사고보고서를 통해 무인차 사고 원인을 알아야 한다”고 주장했다.
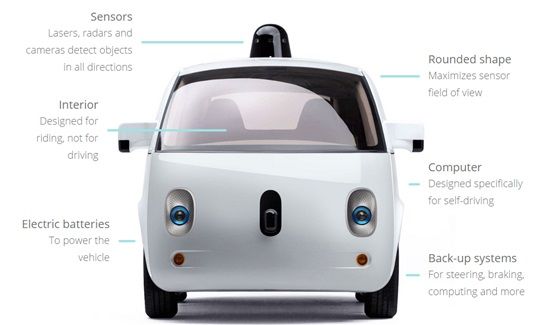
자율주행차 위기론과 컨슈머 워치독의 압박이 커지자 구글은 사내 자율주행차 연구 현황을 공개하는 월간보고서를 내기로 했다. 구글 자율주행차 프로젝트 블로그 등을 통해 매월 초 업로드되는 이 보고서는 자율주행차 운행 현황과 사고 발생 경위 등이 소개되고 있다. 소비자들이 궁금해하는 라이더, 레이더 등 센서 인식 기술에 대한 상세 설명도 볼 수 있다.
구글은 월간보고서로 완전 자율주행차 상용화를 위해 나아가고 있지만, 아직 자체적으로 해결해야 할 과제가 많다. 구글에서 운영하는 렉서스 RX450h 자율주행차가 지난 2월 캘리포니아 마운틴뷰 교차로 부근에서 발생한 접촉사고 가해차량으로 지목됐기 때문이다. 구글은 사고 당시 책임을 인정하고 소프트웨어 개선을 통해 이같은 상황을 방지하기 위한 노력을 기울이겠다고 밝혔다.
■갈길 먼 완전 자율주행차 기술
지난 5월 테슬라 차량 사고 당시 운전자는 전방 주시 의무를 다하지 못한 채 영화 해리포터 감상에 몰두한 것으로 알려졌다. 이로 인해 이번 사고는 사망한 모델 S 운전자의 책임이 커질 가능성이 높다.
테슬라는 “오토파일럿이 진행되면 계기반이나 센터페시아 디스플레이에 ‘오토파일럿은 운전 보조의 역할을 하는 기능입니다. 항상 운전자는 안전을 위해 손을 스티어링 휠에 잡아야 합니다’라는 메시지가 뜬다”며 “오토파일럿 작동시에는 운전자가 자동차 작동 등 모든 측면에서 책임을 져야 한다”고 강조했다.
하지만, 업계 스스로도 운전자를 위해 측면 충돌 방지 기술을 발전시켜야 나가야 한다는 목소리도 나오고 있다. 사고의 책임이 전적으로 운전자에게 있기 보다 안전 사양을 제대로 갖추지 못한 제조사의 책임도 크다는 것이다.

댄 갈브스 모빌아이 커뮤니케이션 총괄은 미국 자동차 매체 일렉트렉과의 인터뷰에서 “충돌 방지를 위한 긴급제동장치(AEB)는 오늘날 선행 차량의 뒷모습과 보행자만을 인식할 수 있다”며 “지난 5월 사고처럼 측면 물체에 대한 인식이 되지 않다는 게 사실”이라고 밝혔다.
그는 이같은 문제를 해결하기 위한 교차로 주행 인식 시스템 출시를 약속했다. 오는 2020년부터 교차로 주행 인식 시스템 자체에 대한 안전 기준을 마련한다는 유로 NCAP 기준을 맞추기 위해, 해당 시스템을 오는 2018년 출시한다는 것이 모빌아이의 계획이다.
관련기사
- 테슬라, 오토파일럿 사망사고에 "참담하다" 애도2016.07.04
- ‘드라마도 관심’ 현실화된 자율주행차2016.07.04
- 한국포스트휴먼학회, 자율주행차 입법전략 논의한다2016.07.04
- 현대모비스, 자율주행차 운행 허가 받아2016.07.04
국내 전문가도 교차로, U턴 주행 등의 과제 해결이 자율주행차 상용화의 지름길이라고 설명한다.
정구민 국민대 전자공학부 교수는 “교차로, 차선변경, U턴 등의 주행 패턴을 인식할 수 있는 기술 개발이 자율주행차 신뢰성 회복의 최대 과제로 손꼽힐 수 있을 것”이라며 “자율주행 인식 오류를 줄이기 위해서는 제어 인식 통신을 융합해 나가는게 완전 자율주행차 상용화에 중요한 요소”라고 밝혔다.