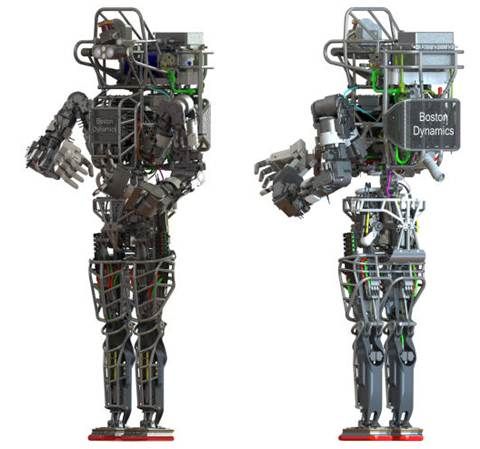
지난 12일 미고등국방기술연구소(DARPA)가 가장 놀라운 미래형 로봇 아틀라스를 공개했다. 군용 로봇만 만드는 것으로 알려진 보스턴 다이내믹스의 키 180cm짜리 휴머노이드로봇은 인간을 돕기 위해 만들어진 것이다. 28개의 수압으로 작용하는 관절을 가진 이 2족보행 로봇은 지금까지 만들어진 휴머노이드 로봇 가운데 가장 진보된 형태의 것이다.
DARPA가 주최하는 버추얼로보틱스챌린지에 도전중인 참가자들은 물리적 외형을 구성하고 있는 로봇에 SW두뇌와 신경을 가진 휴머노이드를 만들어 자웅을 겨루게 된다.
다르파로보틱스챌린지(DRC)는 다르파그랜드챌린지와 다르파 어번챌린지로이어진다. 지난 해 10월 시작됐으며 내년말까지 27개월간 3개 부문에서 경합을 벌이게 된다. 지난 달 있었던 버추얼챌린지에 이어 2개의 실제 경합(챌린지)이 오는 12월과 내년 12월에 있을 예정이다.
이 2족로봇들은 더 나은 센서,근육같은 액추에이터, 훨씬더 앞선 계획과 컨트롤시스템을 바탕으로 매일매일 우리인간과 같은 진보를 해 나가고 있다.
씨넷은 15일 DAPRA챌리지에 즈음해 30년 이상된 인간과 닮은 휴머노이드 로봇의 발전과 진화과정을 되짚어 살펴봤다. 조만간 이같은 휴머노이드 로봇이 우리주변을 어슬렁 거리게 될지도 모른다. 허리 아랫부분만으로 걷는 반쪽짜리에서 터미네이터로 진화, 변신한 휴머노이드 로봇의 변신사를 소개한다. ■인공근육의 개발
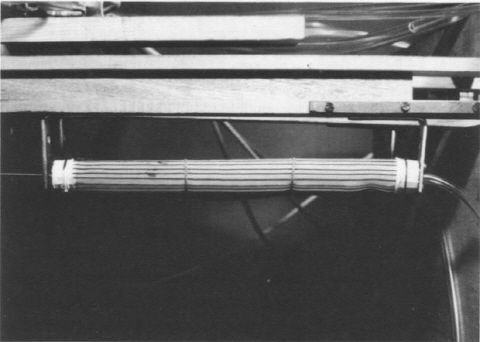
1967년 가토 이치로 와세다대 교수팀이 인공근육을 개발했다. 이 대학은 초기 로봇연구의 중심이었다. 수축된 근육같은 움직임을 표현할 수 있는 수평축과 함께 고무가 수많은 실 사이에 심어졌다.
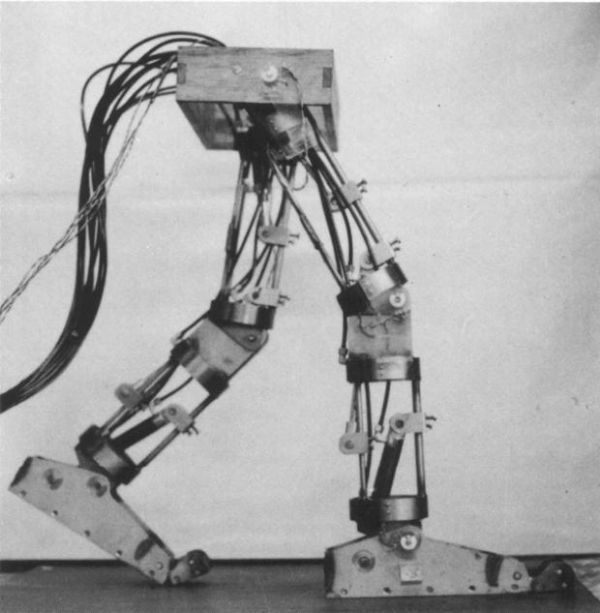
■인간같은 스윙 와세다대가 만든 전기수압 서보액추에이터를 가진 마스터슬레이브 제어방식의 WL-3로봇이 만들어졌다.
WL-3은 최초의 인간같은 스윙과 걸어다니는 기능은 물론 다리로 서거나 앉을 수 있는 로봇이다.
■인공근육 가진 로봇
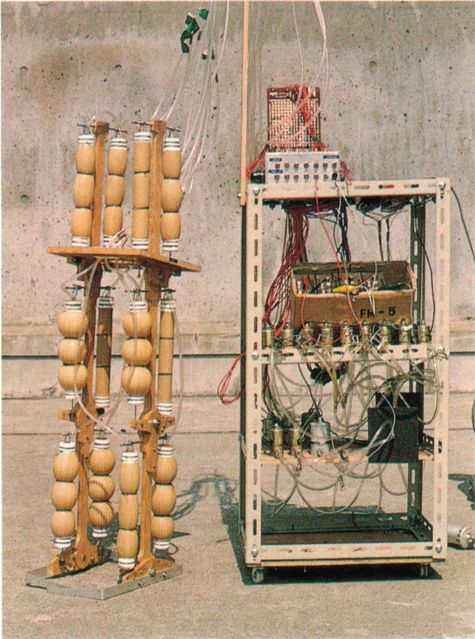
컴퓨터에 의해 조종되는 컴퓨터제어에 의한 WAP-1 로봇은 액추에이터에 고무로 된 인공근육을 가지고 있었다.2족움직임은 인공근육의 플레이백 제어를 가르침으로써 가능했다.
■한걸음에 45초 걸린 휴머노이드
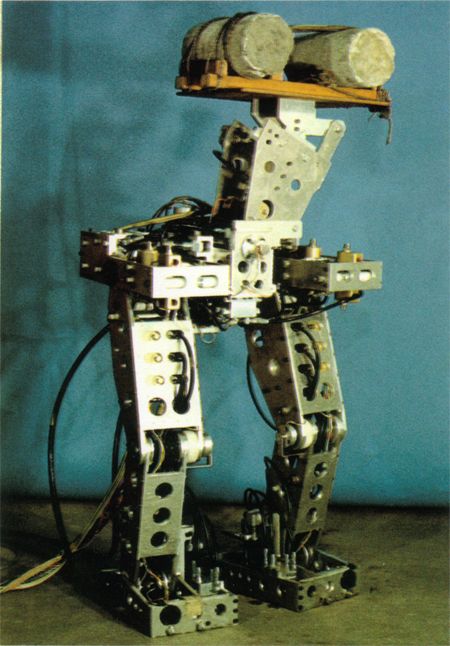
발자국미니컴퓨터로 제어된 와세다대의 WL-5는 걷고 방향을 바꿀 수 있다. 속도는 발자국당 45초나 걸리는 느린 것이었다.
■걷고 물체를 이동시키고
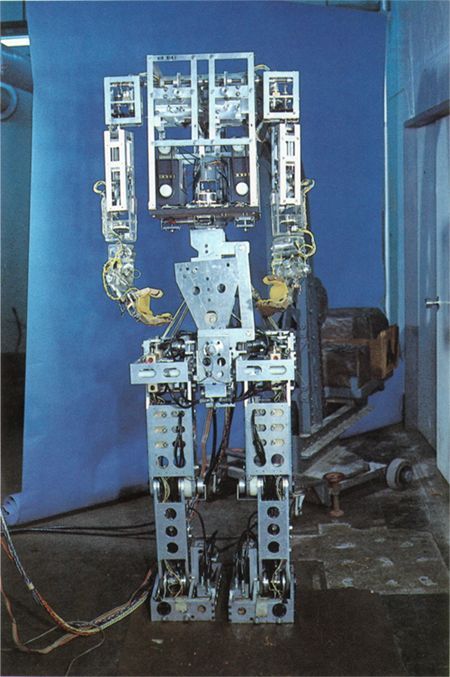
와봇-1은 전세계 최초의 완전한 컴퓨터제어 로봇이었다. 다리제어시스템,비전시스템,통신플랫폼이 통합된 로봇이었다. 와봇은 센서로 물체의 거리와 방향을 측정하고 걸을 수 있으며 물체를 잡을 수 있는 것은 물론, 접촉센서를 사용해 물체를 움직일수도 있었다.
■최초의 휴머노이드 한걸음에 1.3초
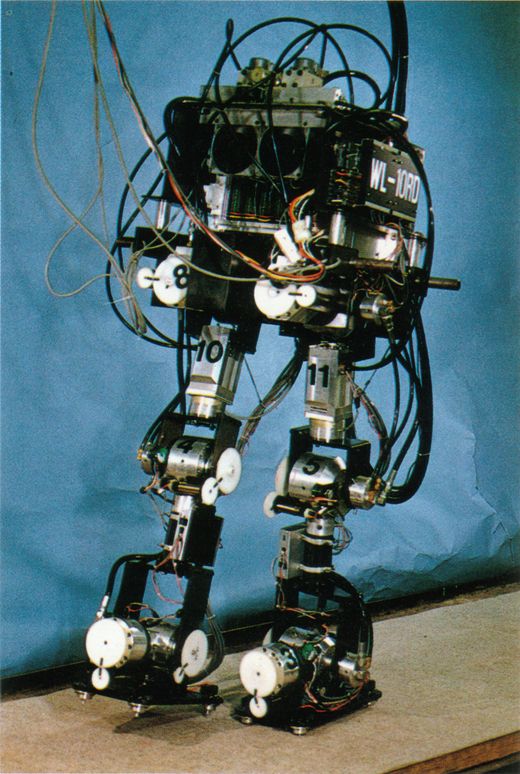
와세다대의 WL10RD는 발목과 엉덩이관절을 통합시킴으로써 피드백을 통해 로봇이 한발에서 다른 발로 이동할 때 균형을 더 잘 잡을 수 있도록 설계됐다. 이 첨단 기술은 비롯 한발자국에 1.3초나 걸렸지만 최초로 로봇이 걸을 수 있도록 해 주었다.
■가정용 휴머노이드 섀도우

1987년 리처드그린힐에 의해 세워진 섀도우는 각 가정에서 일상적인 생활속의 일을 돕기위한 일반 목적의 로봇 제작 및 관련 기술을 개발해 왔다.
■군용 휴머노이드

퍼시픽노스웨스트국립연구소의 로봇 매니(Manny)는 지난 1989년 미육군용으로 만들어졌다. 매니는 실제 인간크기였으며 당시에는 사람처럼 보였다. 하지만 지능과 자율적인 동작 기능을 갖지 못하고 있었다.
■배터리 구동 휴머노이드 P2

혼다의 배터리로 구동되는 키 180cm,무게 208kg짜리 P2 휴머노이드가 지난 1996년 12월20일 토쿄에서 공개됐다.
■풀사이즈 휴머노이드 H5

1998년 도쿄대 조우후시스템쿠각연구소가 풀사이즈의 H5휴머노이드를 만들었다.
■말하고 걷는 휴머노이드...페널티킥까지

걷고 조작하고 말하고 볼수 있는 휴머노이드 림-A(REEM-A)는 지난 2005년 완성됐다. 2006년 브레멘 로보컵에 참가해 걷기 부문에서 이기면서 이 시합의 페널티킥 부문 준결승까지 진출했다. 우승했다.
지난 2007엔 전년도와 똑같은 SW를 사용해 애틀란타 로보컵대회에 참가했고 또다시 페널티킥 경쟁부문 결승에 나갔다.

■사람과 대화하는 인터랙티브 휴머노이드 로보테스피언(RoboThespian)은 지난 2005년 영국의 엔지니어드아츠사에서 시작된 로봇으로서 완전한인터랙티브방식의 로봇이다. 여러 언어 사용, 유저친화적 경향을 가지고 있으며 인간과 양방향소통과 통신을 할 수 있다. 8만5천달러(9천500만원)에 구입할 수 있다.

■HRP로봇 시리즈, 인간에 다가서려 하다 HRP-3 프로멧MkII(Promet Mk-II), HRP-2 포로멧, HRP-3프로토타입 휴머노이드로봇이 지난 2007년 6월21일 도쿄 북쪽 우츠노미야시 호가타운의 가와다산업연구소에서 선을 보이고 있다. 160cm키에 68kg몸무게를 지닌 이 휴머노이드로봇은 HRP-2 프로멧 휴머노이드로봇을 업그레이드한 것이다. 가와다산업연구소, 일본국립산업기술총합연구소,가와사키 중공업이 함께 만들었다.<사진=키다무라 토시후미/게티이미지/씨넷>
■인간처럼 달리고 싶은 로봇
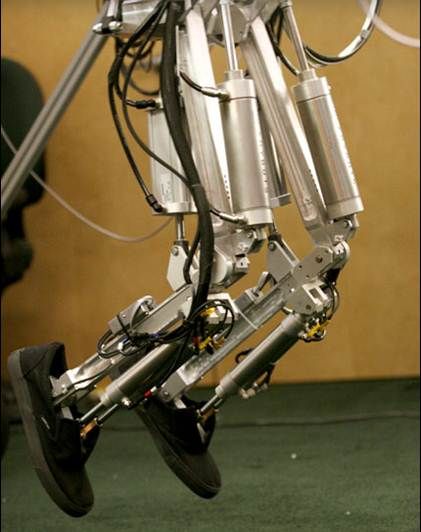
미 캘리포니아의 애니봇(Anybots)은 두 대의 휴머노이드 로봇 덱스터(Dexter)와 몬티(Monty)를 개발했다. 여기에 보이는 덱스터는 점프를하며, 2족을 가지고 있는로봇으로 150cm의 키에 61kg의 몸무게를가지고 있다. 걷고 점프하며 사람처럼 역동적으로 자신의 몸체 균형을 잡고 서 있을 수 있다. 애니봇은 로봇 몸체의 위에서 아래까지 차별화하는 시스템을 만들었다.
이 시스템은 정보를 이용해 로봇의 다리에 있는 공기압실린더나 근육에 끊임없이 정보를 제공해 근육을 조정한다.
■티셔츠를 개 주는 살림도우미 휴머노이드

휴머노이드로봇 에어로블루(Aero-Blue)는 지난 2008년 8월17일 일본 가와사키현에서 열린 살림로봇콘테스트에 첨석해 능력을 보인 로봇이다.
당시 이 로봇은 세탁바구니에서 T셔츠를 집어 개는 능력을과시했다. 로봇은 점점더 일상생활을 도울 수 있는 기능으로 우리주변으로 가까이 다가오고 있다.
■ 아시모
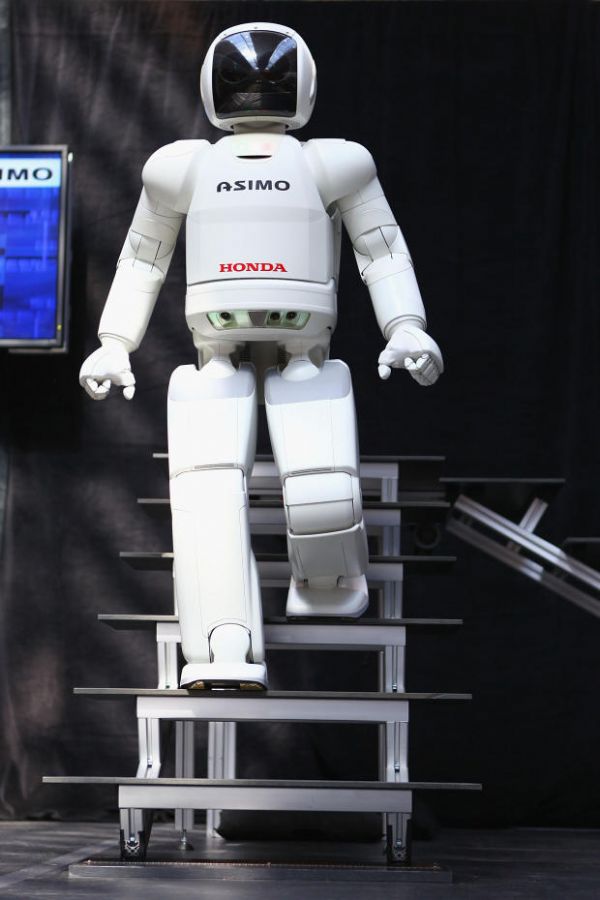
혼다의 아시모는 가장 유명한 휴머노이드로봇 가운데 하나다. 지난 2011년 4월28일 미 세인트루이스 아메리카센터에서 열린 퍼스트챔피언쉽에 모습을 드러냈다.
■인간두뇌에 다가가는 휴머노이드
관련기사
- 터미네이터 닮은 로봇 아틀라스 공개2013.07.15
- 광운대-프리스케일 "연말까지 휴머노이드 개발"2013.07.15
- 美해군함에 휴머노이드 소방로봇 도입한다2013.07.15
- 아시모 이제는 한발로도 껑충껑충2013.07.15

이들 로봇은 더나은 제어시스템,센서,생명체와 유사한 액추에이터를 가지게 되면서 이미 보다 앞선 영역항법기능과 인간을 위해 설계된 툴사용을 할 수 있게 됐다. 그 다음은 두뇌다. 그리고 DARPA는 이에 대한 연구를 하고 있다. 올초 제임스 K 김세우스키 LA대(UCLA) 화학과교수는 내셔널디펜스매거진((National Defense Magazine)에 “조만간 인간은 뇌의 자기조직 특성을 흉내내는 방식으로 로봇시스템에서 혁명적인 혁신을 보게 될 것”이라고 전망했다. DARPA와 함께 일하는 김세우스키는 물리적지능으로 플리는 프로그램에 참여하고 있다. 그는 “이들 기기는 전통적인 컴퓨터에서처럼 정보를 메모리에서 프로세서로 움직이는 대신 전혀새로운 방식으로 정보를 처리하고 있다”고 말했다.